Autonomous Drone Battery Swapper
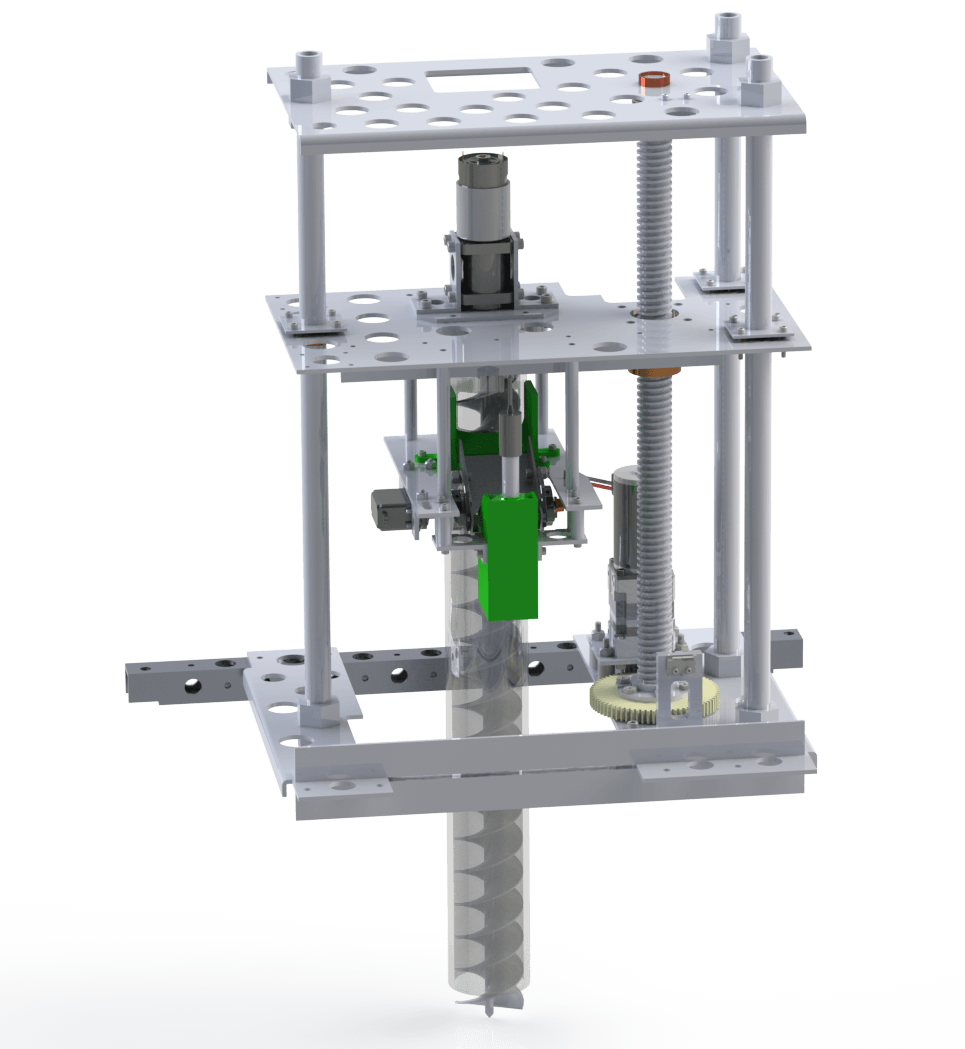
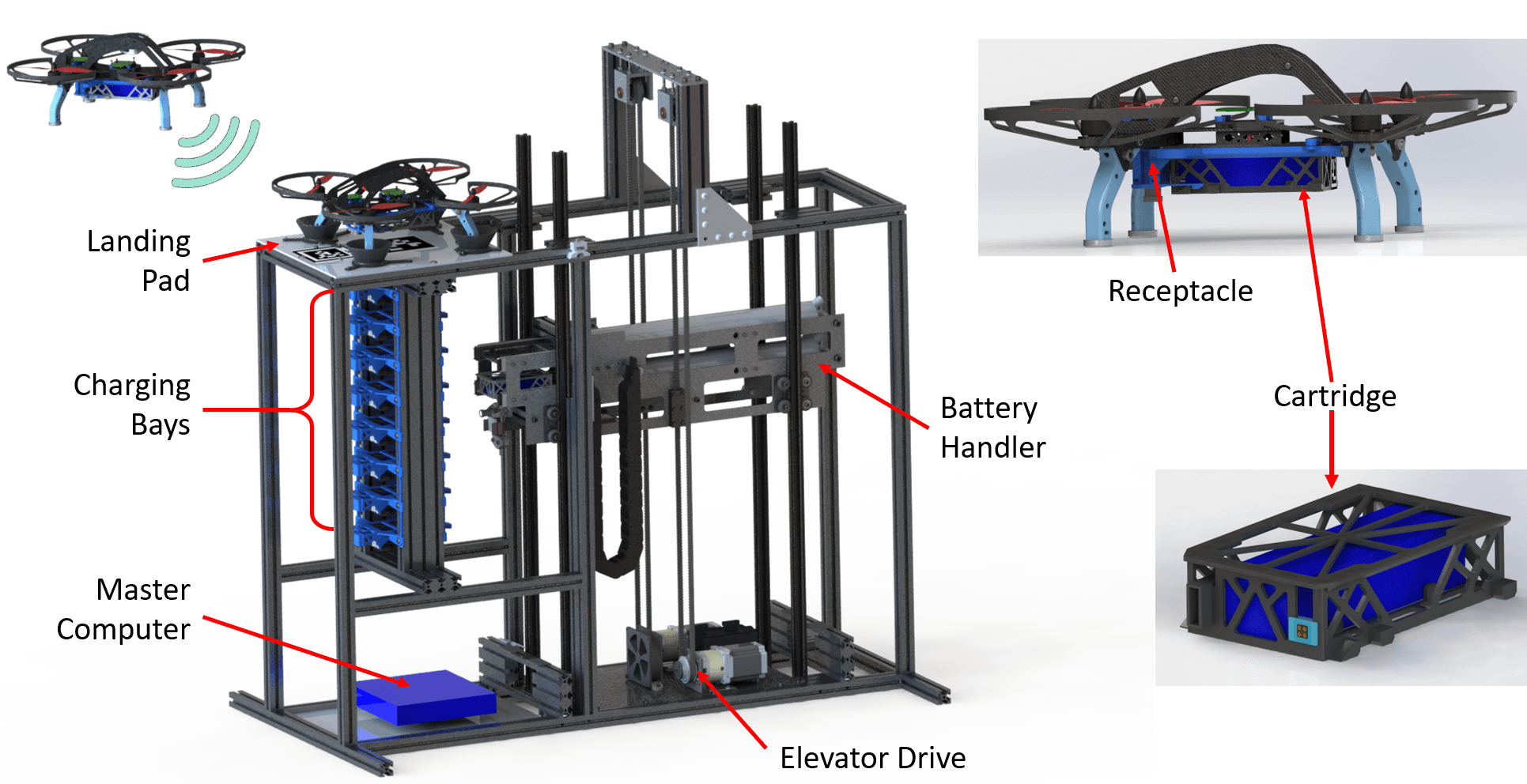
For my capstone design project I worked with three friends to build an autonomous drone battery swapper. The system featured a receptable on each drone, several battery cartridges, and a landing tower capable of performing swaps in under 30 seconds and recharging depleted batteries.